

Technology: The offshore race evolution
Published on November 9th, 2020
As the Vendée Globe gets underway, the fleet of solos IMOCA skippers will be testing groundbreaking gear in the harshest environment, and what survives the hardship may influence the direction of sailing. Among the hot topics is autopilots which are seeking to be better than the real thing… people.
Jean Sans, who helped to develop the Channel Handicap Rule, the precursor to the IRC Rule, and now an expert consultant in the marine industry, offers some thoughts about autopilots, racing rules, and the intrusion of increasingly sophisticated algorithms (Artificial Intelligence) in the steering of racing yachts.
David Carr, winchman of the British team INEOS (AC75), reveals for Yachting World what life is like for Ben Ainslie’s America’s Cup crew. The first six lines of his interview are almost surprising.
“When you leave the dock, your life is in the hands of the computers -and the guy who steers the boat out of the water, of course. All the systems on the boat, except for the winches turning, depend on computers.

“You are then aware that you are now sailing on a boat that is based entirely on computer code. But I guess when you’re sitting in an aircraft at 40,000 feet, it’s exactly the same thing.”
The man and the boat.
Immersed in the analysis and decoding of the AC75 since the first video presented by the New Zealanders, as in that of IMOCA and hydrofoil ships in general, I am not surprised by David Carr’s reaction. It should be noted, however, that the AC75s have (almost) all of the lift equipment needed to control flight. This is not the case with other monohulls such as IMOCAs.
Flying at as constant an altitude as possible, on a stable chosen trajectory, supposes:
• That the physical configuration of the boat allows for the control of altitude, trajectory, and momentary imbalances (loss of power, loss of lift, cavitation and ventilation of the lift or control elements).
• That the dialogue between man and lift system is possible. In other words, that man should be able to understand the evolution of the flight environment and translate it into coherent piloting information with a high level of reactivity.
Moreover, many IMOCA skippers recognize that this new evolution of boats equipped with very powerful foils has become impossible to steer. This leads us to reflect on the importance and influence of technique in navigation (steering) and the effect that it insidiously tends to superimpose itself, or even to take the place of the skipper.
Navigation software has already largely exceeded its initial objective, which was to position the boat’s track on the chart at the moment “t”.
By coupling on the same algorithmic module, the position (and the parameters linked to it), the forecast weather evolutions, the currents and the boat’s speed potential (polar), a new assistance to the skipper is produced.
However, this algorithmic module has no common feature with the original positioning device, the “GPS”.
What then are the limits of these algorithms in the relations between the Skipper, the Equipment, and the external data?
In other words, when sailing, knowing exactly where you are on the water does not give you the route to your destination because the straight line is not necessarily the right solution.
Offshore regattas or Inshores use handicap systems to be able to classify the boats among themselves. All of the rules more or less directly tax the material of the mast, keel, hull, surfaces, etc, etc… but none of the rules limit or tax navigational or decision-making aids.
The question of sporting equity in these conditions is questionable, especially as the Rating Rules tax electric winches under the pretext that RRS Rule 52 requires that maneuvers be carried out using only manual force.
Finally, “electric muscles” are taxed but not “electric intellectual muscles”. Fairness… where are you?
The infernal spiral of the technique.
Technicians, by nature, always want to progress and innovate. This is their basic training. As long as the evolutions concern a winch, pulleys, or even sail materials, mast, it is not a real problem.
Of course, these innovations improve the boat’s performance, but under no circumstances will they transform a “bad skipper” into an Olympic medalist and above all they remain controllable by the sporting authority.
Currently, the RRS only includes two rules (Doping and Rule 52 MANUAL ENERGY) on the relationship between MAN and BOAT, and this in 7 chapters and 18 appendices that make up the RRS.
Either for rule 52: “The standing rigging… the moveable appendages of the hull must be adjusted and maneuvered solely by the force provided by the crew”.
We could very well ask ourselves whether the use of decision support software does not constitute a form of doping, since these algorithms increase the intellectual and decision-making potential of the skipper.
But this reflection is not new, already at the finish and Geoffrey Williams’ victory in the 1968 OSTAR, the question had been asked following routing operations (a first in Ocean Racing) from land which the winner had benefited from. However, it would take a few decades for the boats to become autonomous in terms of access to external information. But the idea was there.
Coming back to the RRS, from the very first single-handed sailings and particularly in racing, the “automatic pilot (AP)” proved to be indispensable.
In the 1960s (the beginning of single-handed regattas) energy on board the boats were very limited. This equipment was a sort of autonomous vane that acted on the helm and corrected course deviations.
These systems, although very ecological, were quickly replaced by increasingly advanced and complex technologies.
For solo and double-handed regattas, RRS Rule 52 is therefore necessarily amended. Rudder maneuvering and its amplitude use a different type of energy from that used by the crew. The AP also uses a control system other than the brain of the skipper and/or the crew. This methodology is still in use today.
Recently the RORC published a report which strongly recommends that the use of autopilot (AP) systems be generalized – without penalty – in crewed ocean races, including major events.
Although at this stage this proposal is only a recommendation and comes from the Race Office, and not from the RORC’s Sailing Committee, the idea is in the air (and on the Net…).
If one associates it with the world situation of inshore or offshore regattas, it is possible that this proposal will be adopted and generalized, all the more so as the application of Rule 52 of the RRS (World Sailing) is the exclusive responsibility of the Clubs or the Organizers.
What effect does the sophistication of the technique have on the regatta?
A mechanical sport is first of all governed by rules specific to the vehicle (for boats: the Rating Rules). In regattas, the ColReg have to be added, which represents a relatively complex, but assimilable set of rules.
Automatic pilot (AP) developers, who are up to date with technical developments and new types of boats, especially Foilers, quickly understood that the helmsman can be replaced by a much more reliable, attentive, reactive, efficient, and indefatigable module.
Thus, over the years, high-performance equipment allowing the development of increasingly sophisticated algorithms has been introduced into APs.
It is not the development of these algorithms that poses a problem, but the knowledge of the continuous position of the boat in 2D or 3D space (Archimedian or Flight). Then, of course, there is the question of the data acquisition and processing systems that surround or end up on the boat and, above all, the question of the boat’s position in space and in continuous flow.
When things get complicated.
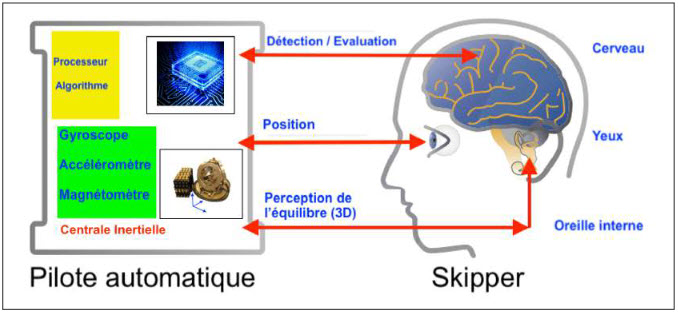
Today, the “PA Archimedean’s” used in single or two-handed are equipped with so-called “intelligent” sensors.
For each axis, these intelligent sensors include gyrometers that provide angular velocity, accelerometers, and magnetometers that provide information on the variation of the magnetic field.
This continuous flow of data feeds an algorithm whose job is to merge them to produce the final orientation of the boat on the water relative to “North”. The technologies embedded in these APs are related to the performance of relatively slow Archimedean boats.
There are hundreds of sensors on the market that generate these types of information. They are grouped together under the name of Inertial Sensors.
In “normal” navigation, the compass, the rudder, the keel, the Archimedean laws are sufficient to control the 4 degrees of mechanical freedom possessed by the boat. When the boat starts to fly, it enters the 3D domain and at that moment evolves with 6 degrees of freedom.
The usual 2D navigation equipment is not sufficient. In other words, to fly, therefore in 3D, it is necessary to be able to navigate on a horizontal plane located above the sea surface and this without any horizontal reference.
The invention, in 1852, of the gyroscope (which would become over the years and technologies an Inertial navigation units) would automatically ensure this function. For nearly 150 years, the basis of the gyroscope’s operation (Inertial units) will be a very sophisticated, heavy, voluminous, and energy-consuming mechanism.
In fact, a gyroscope is a rather heavy disc that is rotated at 10,000, 15,000 rpm, this disc being in balance on the 3 axes X, Y, Z. Modern electronics, fiber optics, and lasers will lead to the abandonment of mechanical systems in the production of Inertial navigation units and the birth of a simpler technological variant: the “Inertial Sensor”.

The evolution of the different technologies will make it possible to miniaturize the equipment, which will make it possible to integrate “gyroscopes” in cars, smartphones, etc… but this miniaturization will be to the detriment of performance, to such an extent that there is a hierarchy of types of “gyroscopes”, from Inertial Sensors to Inertial navigation units.
Inertial sensors… Inertial navigation units…
In principle, the objectives of these two devices are identical: to be located in the 3D space in relation to a reference system. It is their internal technological equipment, essentially gyrometers and gyroscopes, that differentiate the Inertial Sensors and the Inertial navigation units.
The gyrometeris a sensor that provides the angular velocity with respect to the inertial reference frame of the instant “t”. It is used on inertial sensors.
The gyroscope gives the angular position (in 3D) of its referential at the instant “t” with respect to its referential at the moment of departure (t=0). An inertial navigation unit will be equipped with a gyroscope.
The first (gyrometer) provides a speed, the second (gyroscope) a position in the space (as a GPS). It is mathematically a different operation, since the speed is the derivative of the position (in fact the distance traveled) and conversely the position corresponds to the integration of the speed.
The problem is that these internal mathematical operations, performed by the processing algorithm, are different depending on whether we use the Angular Velocity or the Angular Position (as a GPS). In fact, the mathematical operation of integration of the velocity towards the position introduces an unknown parameter (this is called a constant) which obliges to use the succession of the estimated positions of the mobile to design the algorithm.
However, the results are much better when working from the positions provided by the gyroscope of an Inertial Navigation Units. The inertial sensor, although usable, will remain limited to Archimedean navigation.
The evolution is not only in the eponymous name, but in the technical quality of the information produced.
The constraints of piloting in Flight, impose today that the PA uses an Inertial Navigation Units in order to obtain a well smoothed trajectory at a few tens of cm of water and at speeds which can reach 15m/s.
Nevertheless, the cost differences between these two equipments are of the order of 60 to 100 thousand euros.
From theory to practice.
Implicitly and historically, it is considered that an autopilot only acts on the rudder angle, i.e. on the trajectory of the boat. It is the rewriting of Rule 52 that decides the limits of action of the AP.
The IMOCA specifies in its class rules that the AP can only act on the rudder angle. Why is the IMOCA so restrictive?
Simply because the IMOCA AP has to steer the boat in 3 dimensions, there is a great temptation to design an AP that operates on other appendages, or even on sheets, standing rigging, canting keel, etc…
But even in 2 dimensions (Archimedean sailboats), conceiving an AP that would operate globally on the boat (rudder, etc.), does not seem to be an aberrant idea in the sense of optimizing boat performance.
And that’s where the problem lies.
These technological evolutions are essentially based on Inertial Navigation Unit whose cost is very high compared to the internal equipment of current APs.
On an IMOCA it is a necessary expense to pilot in flight and in relation to the price of the boat and its operating mode (Foiler).
On a monohull of 10 to 12m, 15m, this represents an excessive ratio (Price of the AP) / (Price of the boat) and gives the boat, which is equipped with it, an extraordinary technical advantage.
Even if limited to a single action on the rudder, this type of AP, equipped with an inertial navigation unit (not to be confused with inertial sensors) will ensure much smoother modifications and control of the steering trajectory, which will result in very low rudder angles and a significant reduction in drag.
Of course, it can be expected that the diffusion of this sophisticated equipment will result in lower production costs.
But, although the equipment occupies an important place in this “galaxy” that the AP represents, it must be taken into account that the related operations will inevitably lead to increasingly complex algorithms, which, not content to be exponentially expensive, will increase by their sophistication the grip of the “machine” on the boat and implicitly on Man.
Because it is obvious that the information retrieved from the Inertial Navigation Unit, associated with that of the various other sensors, will be used to globally manage the boat’s progress. In other words, the PA will not limit itself to modify only the helm angle. After a while, it is reasonable to ask the question “WHO IS THE HELMSMAN?”
When Artificial Intelligence comes into play in APs.
Artificial intelligence (AI) is developing more and more with its objective is to help decision-making. AI is capable of analyzing millions of data, which man cannot achieve and propose a solution.
In AI we often use heuristic functions. A heuristic function is a mathematical tool that classifies the events perceived at time “t” (eg, sea state, wind, etc..) and which by a comparison algorithm (logical successions of “yes / no”) with configurations previously acquired while sailing, offers a solution for what will happen “t+1”.
To simplify we could say: “here are 3 successive waves that I have just crossed and whose characteristics I have just analyzed. By associating these 3 waves with the previously acquired learning and history, I can predict the possible evolutions of the waves to come (implying the 4th and 5th wave), and adjust the AP and the sails, the appendages to cope with this prediction.”
With this method, the AP quickly anticipates possible actions on the boat in order to adapt it to the environment that the boat will encounter.
Artificial intelligence becomes a possible recourse to find an approximate solution to the problem when the methods of predictive analysis or detection in real time prove impossible to implement.
The optimality, completeness, accuracy or even precision of what should be done in an ideal mode is then exchanged for the speed of decision of the correction to be anticipated and applied to the helm and the boat.
In the end, the solution produced and implemented on the AP will appear to be good enough to solve the problem in question. However, it will not be the best of all solutions. One can only hope that it will be as close as possible to the exact solution and it remains viable because it is very reactive.
The other advantage is that the analyses and the proposed solutions extend continuously over time and above all that they enrich the “learning” mode of the artificial intelligence algorithm.
What are the limits?
Today, nothing prevents an organizer from authorizing the use of very sophisticated servo-controls for boat steering and also authorizing the AP to act on the rudder, but also on the canting keel and tomorrow on the Horizontal Plane Regulation (HPR) of the Foilers… which should happen in the long term on IMOCA boats.
But we can imagine an action on the jib and the mainsail (Harken produces “captive winches” allowing to operate on the mainsheet), on the tension of the rigging…etc.
Inventive genius is boundless. Through the combination of sensors, informations from the Inertial Navigation Unit, processing algorithms and various actuators, the PA will take control of the boat.
As inventive genius is not limited by the combination of sensors, information from the Inertial Navigation Unit, processing algorithms and various actuators, the PA will take control of the boat.
But without going that far, on the mainsail sheet (Harken produces “captive winches” to control the mainsheet), the rigging tension…etc.
As inventive genius is not limited by the combination of sensors, information from the Inertial Control Unit, processing algorithms and various actuators, the PA will take control of the boat.
In 2020, the Class40 has become aware of this problem, it is trying to supervise this equipment:” The electronic equipment is free except for the inertial units. Only Inertial Navigation Units available on catalog and displayed at a public price below 7000 € HT are allowed.
This is a beginning but does not approach the field of action of the AP, which is intrinsically linked to embedded technologies.
It is certain that the actors in Ocean Racing must be those who frame these orientations. Today, it is not the improvements brought about by architectural engineering (design, materials, etc.) that must be exclusively regulated, but rather the substitution of MAN (as a pilot in the general sense of the boat) by SYSTEMS of assistance or control of decisions.
This could also result in a completely enslaved piloting of the boat.
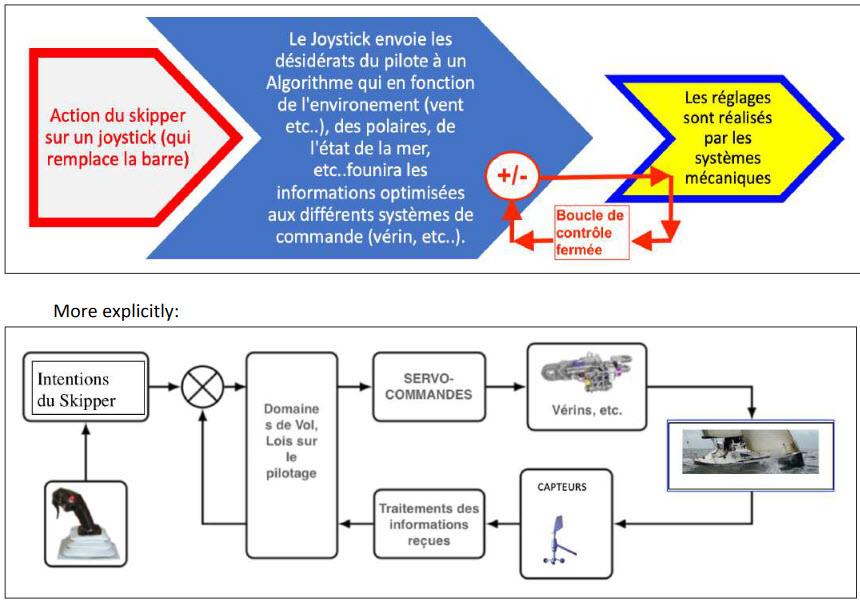
This synopsis shows us that the algorithm decides which actions to take in order to arrive at the final result for the driver.
This means that the driver expresses only one intention and then trusts the algorithm to carry it out. The algorithm contains the navigation domain equations for an Archimedean or the flight domain equations for a Foiler.
But in navigation the action of the skipper is permanent, he will act continuously on the joystick, therefore on the algorithm and by connections on the jacks, electric motor and other equipment that will produce optimal settings.
In fact, this technology establishes an algorithmic link between the Helmsman, the crew that follows while maneuvering and the navigation center that analyzes and forecasts.
One can then reasonably ask the following questions:
“Who is the REAL SKIPPER of the boat?
“WHO CONTROLS THE TRACK: The SKIPPER or the MACHINE”?

Related Posts

Has technology ruined offshore racing? →
Offshore racing routing software in 2026 →

Wind-powered tech and luxury design →
